Exercise 7.4#
Discrete-time implementation Analysis ∙ Robustness of feedback controllers
For the system \(G(s) = 5 \frac{s + 7}{(s + 2)^3}\) a colleague of yours has designed the following feedback controller:
\[
F(s) = 10 \frac{s + 2}{s + 7}
\]
The Bode plots of the open-loop transfer function \(G_o(s)\) are reported in Fig. 63,
Suggest a range of possible sampling frequencies at which the discretized controller should operate.
Pick a value of the sampling frequency, and compute the (algebraic) discretized control law using any method of choice (Forwad Euler, Backward Euler, Trapezoidal rule).
What is the loss of phase margin? Is the residual phase margin still sufficient?
s = tf('s');
G = 5 * (s + 7) / (s+2)^3;
F = 10 * (s + 2) / (s+7);
bode(F*G); grid on; box on;
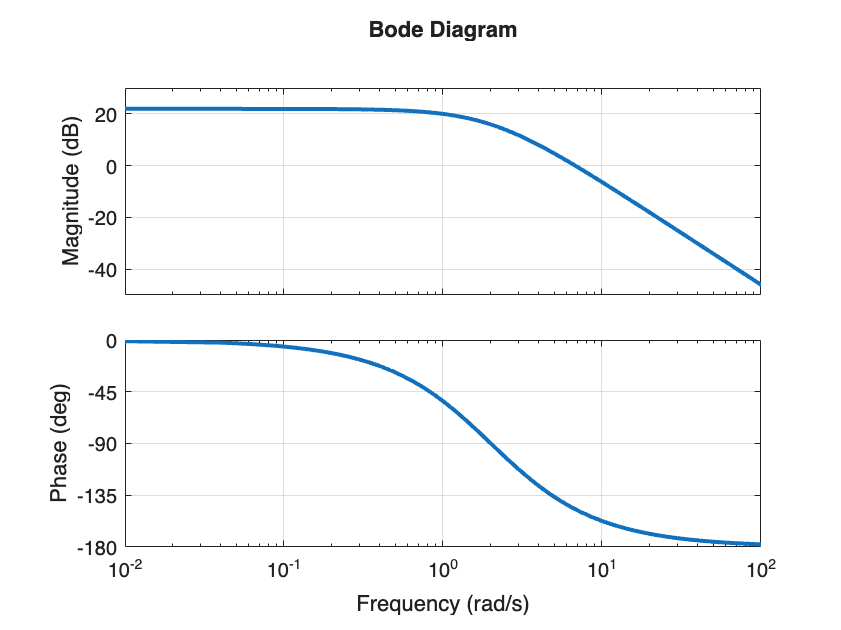
Fig. 63 Bode plot of the open-loop transfer function \(G_o(s) = F(s) G(s)\).#