Solutions of Exercise 2.2#
We want to control the angular position of a DC motor. The transfer function between the applied voltage and the position is
We adopt a proportional controller:
For which values of \(K\) is the closed-loop stable?
If the reference signal is \(\theta_{ref}(t) = R \cdot \textrm{step}(t)\), for what values of \(K\) the steady-state output error is less than \(1\%\)?
Solution#
Question 1#
We start by computing the closed-loop transfer function:
Then, similar to Exercise 1.3, we analyze how the poles of \(G_c(s)\) change as a function of \(K\).
The discriminant is \(\Delta = 100 - 40 K\).
Case \(\Delta > 0\)#
If \(K \leq 2.5\), the discriminant is positive (\(\Delta > 0\)), which means we have two real solutions
The real part of the poles is strictly negative as long as \(\sqrt{25 - 10K} \leq 5\), that is, \(0 < K \leq 2.5\).
Case \(\Delta < 0\)#
If \(K > 2.5\) the discriminant is negative, hence we have two complex-conjugate solutions
The real part is negative and independent of \(K\). Therefore, for any \(K > 2.5\) the closed-loop is stable.
Solution to question 1#
Any \(K > 0\) makes the closed-loop stable.
We can double-check this result looking at the root locus of the system.
s = tf('s');
G = 10/(s*(s+10));
rlocus(G); hold on;
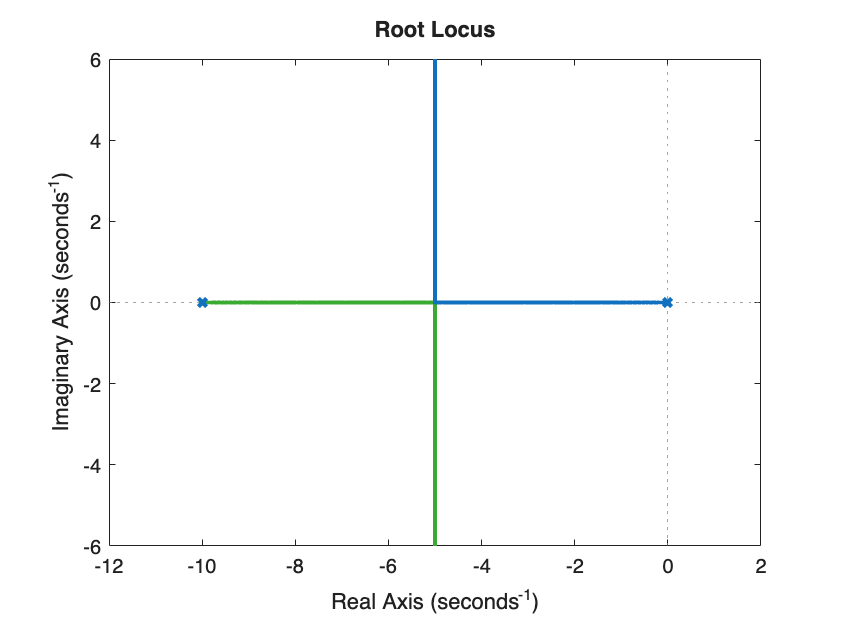
As can be seen, the closed-loop poles are always located in the left-hand half-plane.
Alternative solution with the Routh criterion#
Hint
Checking the stability of a transfer function is usually easier with the Routh criterion, especially when the system is of order \(n \geq 2\) and/or contains parameters (in this case, \(K\)).
The characteristic polynomial, i.e., the denominator of \(G_c(s)\), is
Applying the formula seen during the lectures, the Routh-Hurwitz table reads
\( \begin{array}{cc} 1 & 10K \\ 10 & 0 \\ \hline 10K & 0 \end{array} \)
For stability, all elements in the first column must be strictly positive:
\( \begin{cases} 1 > 0 \\ 10 > 0 \\ 10 K > 0 \implies K > 0 \end{cases} \)
Thus, the system is stable for \(K > 0\).
Question 2#
We now restrict ourselves to the case \(K > 0\), where the closed-loop is stable. Thanks to the stability of the closed-loop, we can apply the Final Value Theore (where \(\Theta_{ref}(s) = \frac{R}{s}\))
The steady-state error is \(e(\infty) = \theta_{ref}(\infty) - \theta(\infty) = R - R = 0\) for every value of \(K > 0\).