Exercise 5.2#
Analysis ∙ Robustness of feedback controllers

Fig. 44 Block diagram of the control system#
The controller \(F(s) = \frac{s+10}{s}\) was designed assuming that the system \(G^0(s)\) was identical to the model \(G(s) = \frac{1}{s+10}\). In Fig. 45, the nominal open-loop transfer function \(G_o(s) = F(s) \cdot G(s)\).
Sketch the nominal complementary sensitivity function \(T(s)\) using the sketching rules discussed in Lecture F7.
Unfortunately, there’s a mismatch between the real system \(G^0(s)\) and its model \(G(s)\). In fact
where the multiplicative uncertainty \(\Delta(s)\) does not have any pole in the right-hand half plane, but is not known. We know, however, an upper bound for its amplitude
Does the feedback controller \(F(s)\), implemented as in Fig. 44, guarentee the closed-loop stability for \(G^0(s)\) despite the uncertainty?
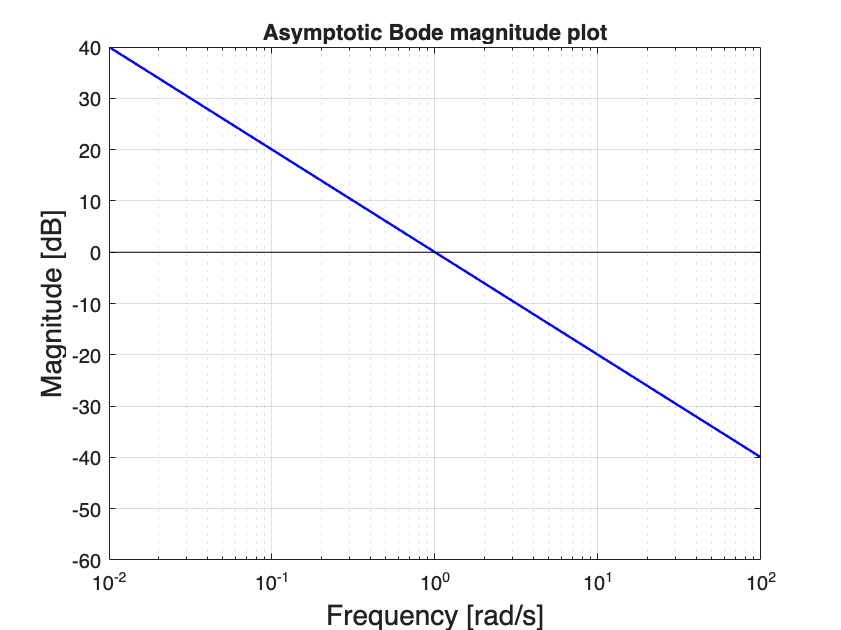
Fig. 45 Magnitude Bode plot of the nominal open-loop transfer function \(G_o(s)\).#