Solutions of Exercise 1.4#
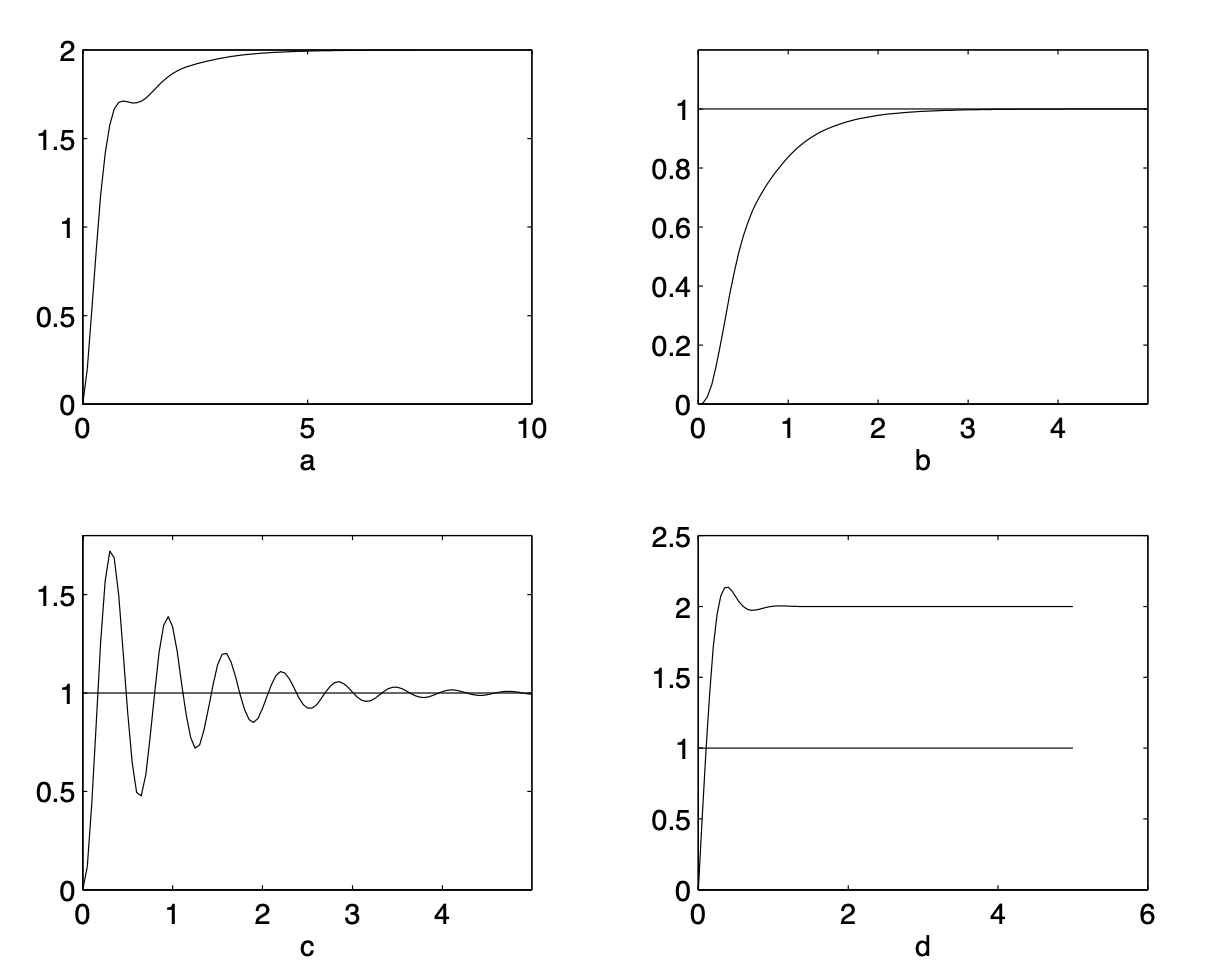
Fig. 8 Step responses to consider (courtesy of Exercise Manual for Automatic Control)#
Pair each step response in the plot above with the correct transfer function from the list below:
\(G_1(s) = \frac{100}{s^2 + 2s + 100}\)
\(G_2(s) = \frac{1}{s+2}\)
\(G_3(s) = \frac{10 s^2 + 200s + 2000}{(s+10)(s^2 + 10s + 100)}\)
\(G_4(s) = \frac{100}{s^2 + 10s + 100} \cdot \frac{2}{s+2}\)
\(G_5(s) = \frac{100}{s^2 + 10s + 100} + \frac{2}{s+2}\)
\(G_6(s) = \frac{100}{s^2 - 10s + 100} \cdot \frac{1}{s+2}\)
Useful formulas to compute the damping ratio and natural frequency of complex-conjugate eigevalues are reported in the Useful formulas.
Solution#
\(G_1(s)\)#
Second order transfer function
Unitary static gain: \(G_1(0) = 1\)
Underdamped (highly oscillatory)
\(T_{99\%} \approx 5\) seconds
These characteristics match plot (c)
\(G_2(s)\)#
First order transfer function
Static gain \(G_2(0) = 0.5\)
\(T_{99\%} \approx 2.5\) seconds
\(G_3(s)\)#
Dominant poles: complex-conjugate eigenvalues
Static gain \(G_3(0) = 2\)
\(T_{99\%} \approx 1\) second
These characteristics match plot (d)
\(G_4(s)\)#
Dominant pole: real pole in \(-2\)
Unitary static gain \(G_4(0) = 1\)
\(T_{99\%} \approx 2.5\) seconds
These characteristics match plot (b)
\(G_5(s)\)#
Dominant pole: real pole in \(-2\)
Static gain \(G_5(0) = 2\)
\(T_{99\%} \approx 2.5\) seconds
These characteristics match plot (a)
\(G_6(s)\)#
Unstable eigenvalues!