Exercise 5.3#
Analysis ∙ Robustness of feedback controllers

Fig. 51 Block diagram of the control system#
The proportional feedback controller \(F(s) = 4\) was designed assuming that the system \(G^0(s)\) was identical to the model, \(G(s) = \frac{1}{s(s+1)}\).
The real system, however, is
The control loop is closed as in Fig. 51.
Compute the real closed-loop transfer function \(G_c^0(s)\), and use the Routh-Hurwitz criterion to establish for what values of \(\alpha\) this transfer function is stable.
Find the multiplicative uncertainty \(\Delta(s)\) that captures the plant-model mismatch.
Using the Bode plot of the nominal complementary sensitivity \(T(s)\) in Fig. 52, apply the “Criterion for robustness to model mismatch” (Criterion 6.2) to find for what values of \(\alpha\) the robustness can be guaranteed.
Comment the (possible) differences in the solutions to question 1 and question 3.
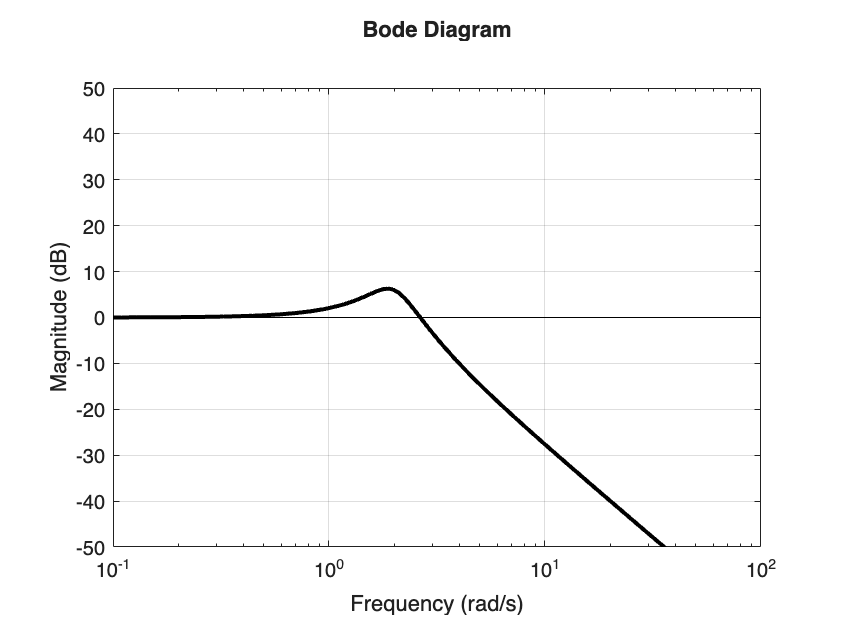
Fig. 52 Magnitude Bode plot of the nominal complementary sensitivity transfer function \(T(s)\).#