Dominant pole approximation#
In this page, we show how to determine the dominant pole approximation of a third-order system having a real pole (\(s=-\gamma\)) and two complex-conjugate ones (\(s = -\alpha \pm i \beta\)). Let this higher order system be
We assume that all the poles are on the left-hand side (\(\alpha >0\), \(\gamma > 0\)).
According to the page Useful formulas, we need to check whether \(\gamma < \sqrt{\alpha^2 + \beta^2}\) or \(\gamma > \sqrt{\alpha^2 + \beta^2}\).
Case 1: The real pole is dominant#
If \(\gamma < \sqrt{\alpha^2 + \beta^2}\), the real pole is dominant because its closer to the origin. In this case, we can obtain the dominant pole approximation by replacing \(s=0\) into the complex conjugate poles
The adjustment of \(\mu\) to \(\tilde{\mu}_1\) makes the static gain of \(\tilde{G}_1(s)\) the same as that of \(G(s)\).
Case 2: The complex-conjugate poles are dominant#
If \(\gamma > \sqrt{\alpha^2 + \beta^2}\), the complex-conjugate poles are dominant as they are closer to the origin (they have a smaller modulus). In this case, we can obtain the dominant pole approximation by replacing \(s=0\) into the real pole
where:
\(\tilde{\mu}_2 = \frac{\mu}{\gamma}\) adjusts the static gain of \(\tilde{G}_2(s)\) to make it identical to that of \(G(s)\)
\(b = 2 \alpha \)
\(c = \alpha^2 + \beta^2\)
Exploratory example#
Below these approximations are reported for a system with the specified values of \(\alpha\), \(\beta\), and \(\gamma\), while \(\mu\) is computed so that the static gain of \(G(s)\) is \(1\) for ease of visualization.
Try out
Open this page in Binder and try to change the values of \(\alpha\), \(\beta\), and \(\gamma\), and reflect on the following points:
What is the dominant pole in this case?
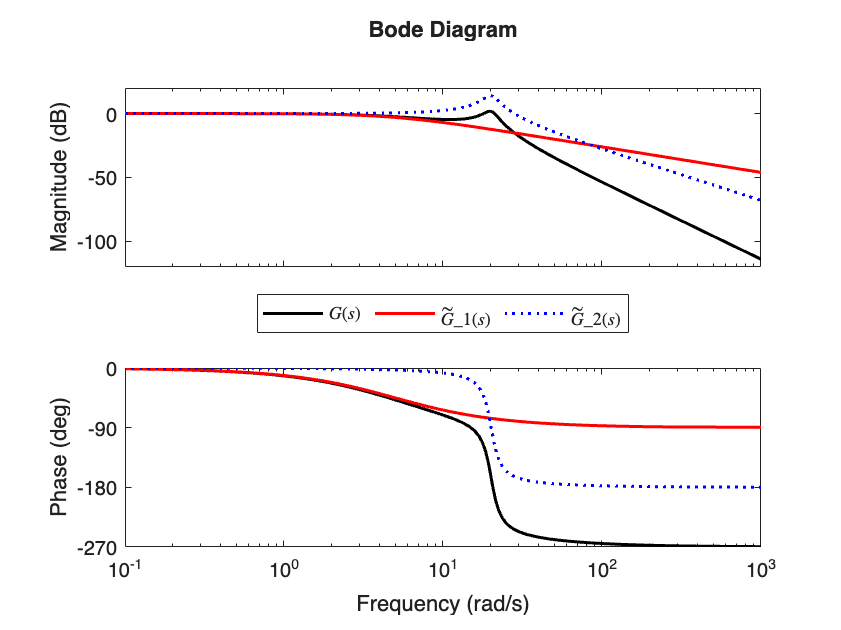
Does the Bode plot of the dominant pole approximation resemble that of \(G(s)\)?
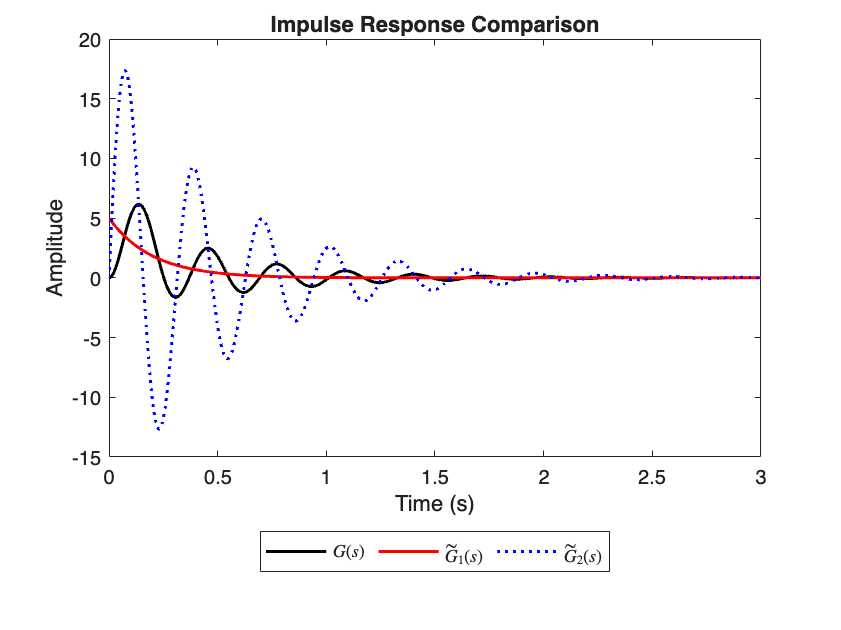
In your specific case, do the impulse and step response look better for \(G_1(s)\) or \(G_2(s)\)?
Is the settling time accurate?
Note
The dominant pole approximation is usually good if \(\gamma\) is at least \(5 \div 10\) smaller/larger than \(\sqrt{\alpha^2 + \beta^2}\). In this case, the poles are well separated and the approximation becomes more accurate!
% Real pole is s = - gamma
gamma = 5; % gamma > 0
% Complex conjugate poles are s = -alpha + i beta
alpha = 2; % alpha > 0
beta = 20; % beta > 0
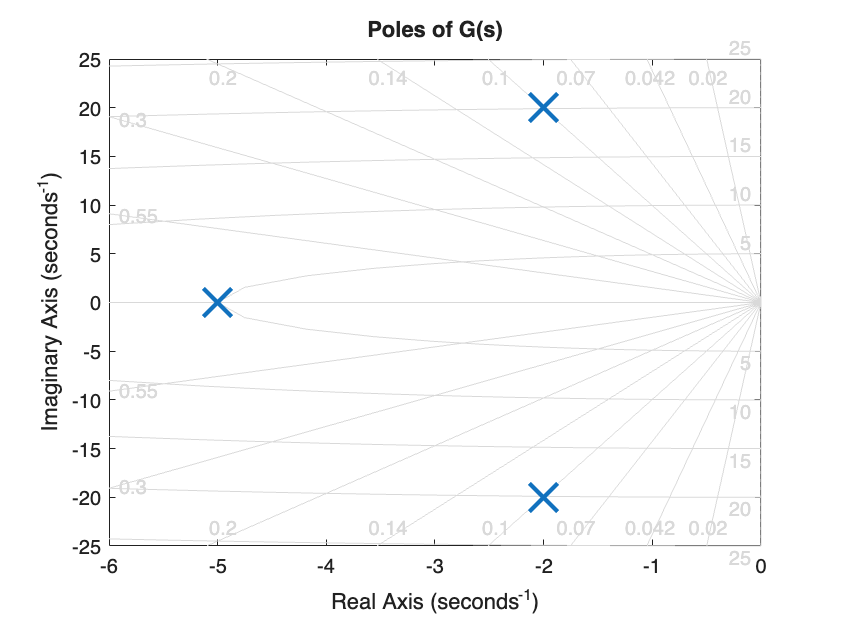
What is the dominant pole?
Dominant pole: s = -5.00. G1(s) is the dominant pole approximation of G(s).
Bode plots comparison
Step and impulse response comparison
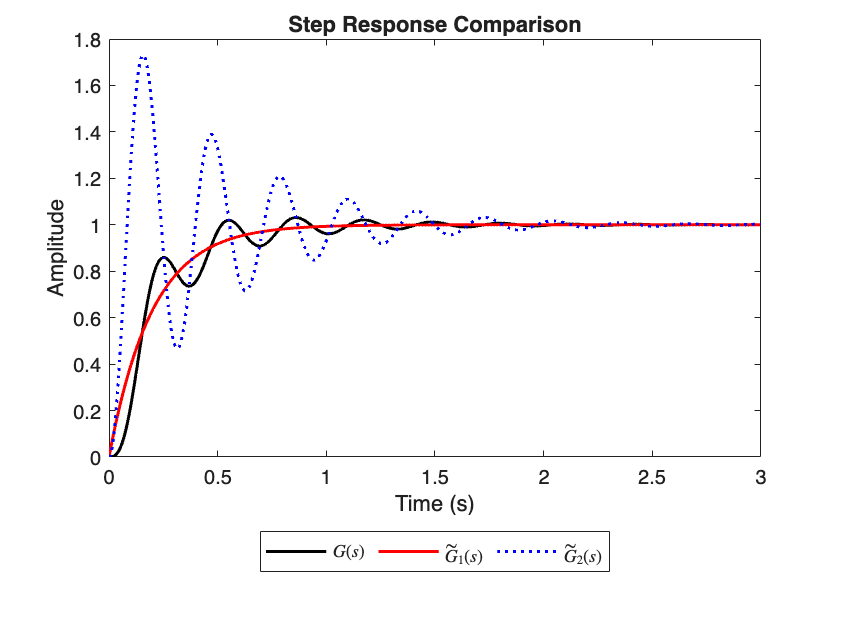
Settling time estimation For \(G(s)\), the settling time is estimated as the value of \(t\) permanently enters the interval \([0.99, 1.01]\). For \(\tilde{G}_1(s)\) and \(\tilde{G}_2(s)\), the settling time is approximated with the formula \(T_{99\%} = \frac{5}{\gamma}\) and \(T_{99\%} = \frac{5}{\alpha}\), respectively (see Useful formulas).
Settling time (99 percent):
of G(s): 1.51 sec
of G1(s): 1.00 sec
of G2(s): 2.50 sec