Exercise 5.0#
Analysis ∙ Robustness of feedback controllers
Consider the control system in Fig. 30, where \(n(t)\) is the sinusoidal measurement noise \(n(t) = \sin(50 t)\).

Fig. 30 Block diagram of the control system#
Assume that \(F(s)=1\). How much is the closed-loop attenuating the measurement noise?
Design a proportional controller \(F(s) = K\), with \(K >0\), that achieves a measurement noise attenuation factor of \(10\).
3. Bonus
Design \(F(s)=\frac{1}{s + \alpha}\), with \(\alpha > 0\), such that
The crossover frequency is at least \(10\) rad/s
The phase margin is at least \(50^\circ\)
The attenuation factor is \(10\)
Tip
Based on the Bode plot of \(G(s)\) reported in Fig. 31, sketch the complementary sensitivity function’s magnitude plot.
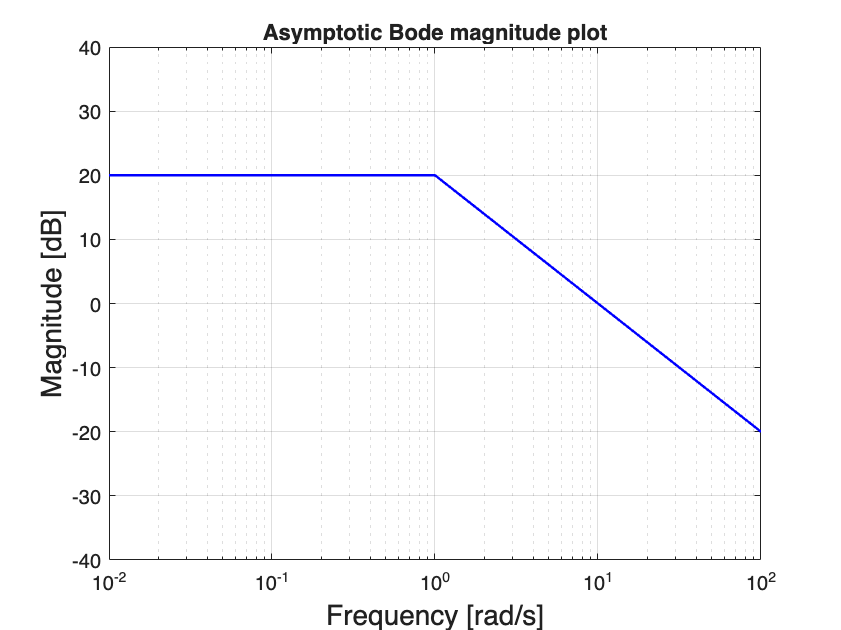
Fig. 31 Magnitude Bode plot of \(G(s)\)#