Exercise 5.1#
Analysis ∙ Robustness of feedback controllers
Consider the control system in Fig. 39, where \(v(t)\) is a sinusoidal disturbance \(v(t) = \sin(\omega t)\).

Fig. 39 Block diagram of the control system#
The proportional controller has a positive gain, that is, \(K > 0\).
Compute, as a function of \(K\), the absolute value of the sensitivity function at \(\omega = 1\) rad/s.
Determine for what values of \(K\) the disturbance \(v(t)\) gets attenuated[1] by a factor of \(9\) at the frequency \(\omega= 1\) rad/s.
If necessary, use the asymptotic Bode plot of \(G(s)\) shown in Fig. 40.
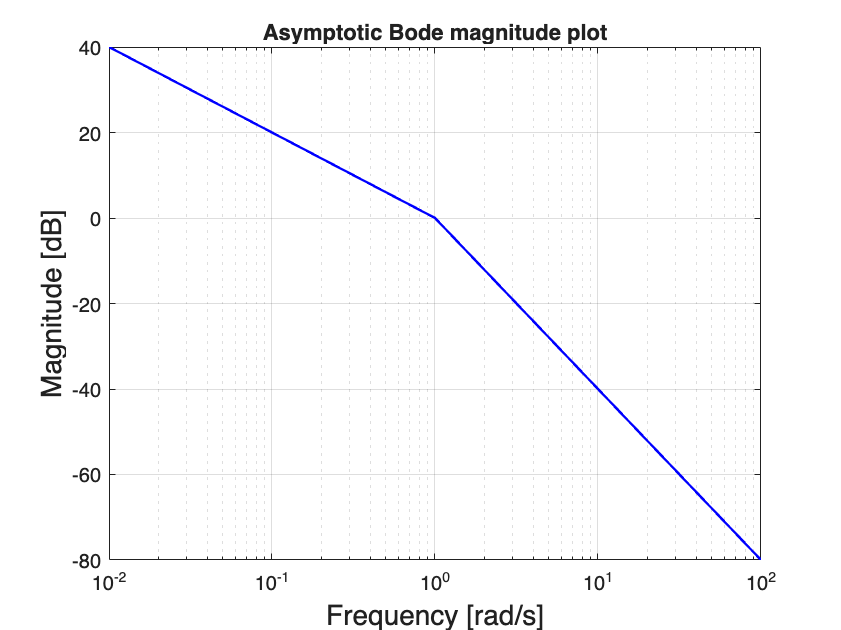
Fig. 40 Magnitude Bode plot of \(G(s)\)#